GPS приемник U-blox-7
Всем привет, и сразу к делу.

Есть, или вернее было, такое чудо от китаез.
Работало исправно аж 2 недели! (в авто магнитоле) Потом не нужны были карты, а когда понадобилось — оказалось не ловит спутники. Определяется на com-5, но при попытке синхронизировать часы зависает на 48%.
Первым делом подумал на магнитолу, заново пере прошил, а вот результат — снова нет сигнала.
После этого, уже подумал на сам приемник. Втыкаю в ноут — все тоже самое, 48% в цикле и все.
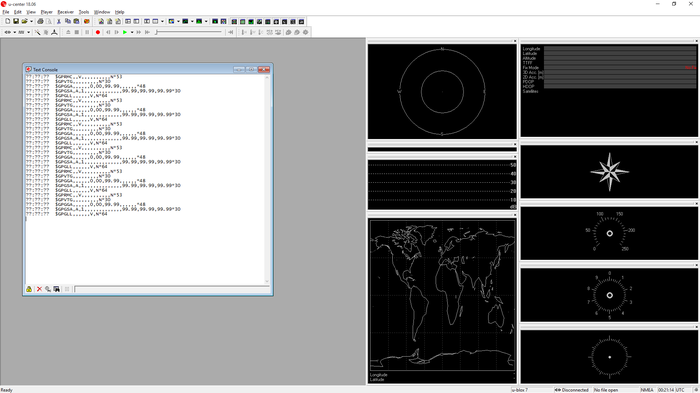
На сайте производителя скачал утилку и прошу. На винде прошил. По логам все нормально. Но при поиске спутников опять на 48%. На скрине уже отключился от приемника.
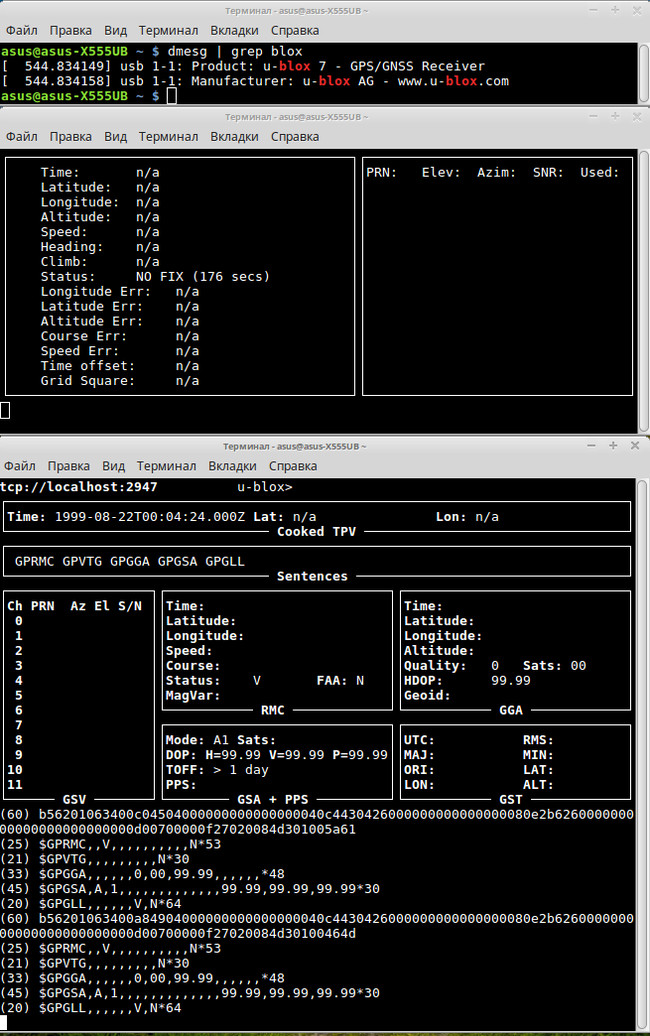
под линем более наглядно
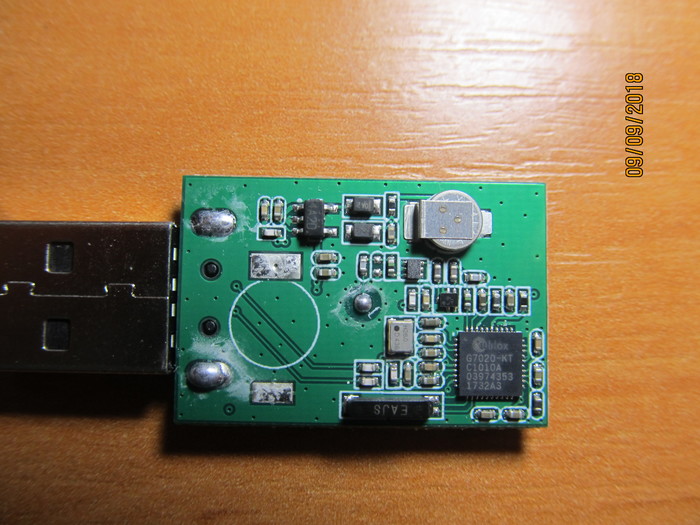
вскрытие показывает что теоретически обугленного ничего нет. Окислений нет — это туман от сборки.
Выкидывать как то не с руки. Ждать 3 месяца пока китаезы новый вышлют тоже не приятно.
Что посоветуете Вы? Может кто сталкивался с таким?
В хозяйстве есть тестер и громадный паяльник. кувалда с наковальней спрашивают почему я за них забыл 🙂
ps. Не смог определиться в каком сообществе опубликовать, вроде и авто, вроде и электроника.
Найдены дубликаты
я бы промыл плату, высушил, потом проверил питание как со стороны USB, так и после преобразователя.
1. replace rtc battery
2. clean the gps ant. we with alcohol pad
Извиняюсь что долго не отвечал, не было времени. 🙁
Заработало. Что сделал: полностью промыл спиртовым раствором, обновил прошивку. снова промыл (на следующий день), снова прошил. «выломил батарейку» и типа малость подзарядил (в нашем селе отродясь таких не видали). поставил ее назад и первый запуск делал в консервной банке. На полном серьезе, выставил за окно и положил в банку! Через 15 минут банку убрал и он сразу нашел 4 спутника. Когда был в городе — 8-9 ловит стабильно.
Уже пару дней как не пользовался — как то нет необходимости.
помыть не помешает, согласен. по напряжениям не нашел схему — ищу.
Проверь напряжение тестером на встроенной батарейке (верхний левый угол). Так, на всякий случай.
1,83- 1,79 (падает в процессе измерения)
прочитал, но не понял как его конфигурировать (например настроить только на прием гпс или только на глонасс) Обычно это nmea команды, которые пишутся в модуль, но в описании я их не нашел.
Да, только там не написано.
Используйте сообщение UBX-CFG-GNSS, чтобы сконфигурировать приемник u-blox в требуемый режим работы
И что дальше? Что конкретно я должен ввести? (в формате nmea)
или я вас не понял, или я не о том думаю.
конфигурирование задается в утилите от производителя u-center
а сам протокол и его формат расписаны здесь http://microsin.net/adminstuff/others/u-blox-7-nmea-protocol.
Обычно модулю можно отправить nmea команду с микроконтроллера и он конфигурируется как тебе нужно. Но не в случае с ублокс. Там это нихрена не написано как сделать, или они что предлагают ставить их студию на микроконтроллер?
Пока что это модуль меня разочаровывает.
Что надо послать, чтобы, например, включить режим только gps?
честно — не знаю. если найду- допишу в личку. мне бы пока его хотя бы запустить.
вот об этом я и думал! он может (*в теории) запускать сразу 2 режима- и зависать. Но пока еще этим не занимался так как нашел схему (напряжения проверить).
спасибо! появилась идея перехватить и распотрашить пакеты. по крайней мере точку остановки внятно определить.
вызывайте омон тут шпион!!
еще проверьте напряжения на преобразователе (4A20) в корпусе sot23-5
LD3985M33R
а я бы и ёмкость по 5v и 3v увеличил хотя бы до 100uF
в реестре нужно было исправить в ветке 5446_422_256 на 5446_423 и название правильное вставить: u-blox 7 — GPS/GNSS Receiver
нет, работал нормально. и определялся нормально. но даже если и в реестре ммс проблема — почему на компе не фунциклирует? ни в линуксе ни в виндовсе?
Советские аналоги ГЛОНАСС и GPS
Цикло́н (гражданский вариант системы известен как «Цикада») — первая спутниковая система навигации в СССР, построенная на базе космического аппарата (КА) «Циклон» и КА «Залив» (Индекс ГУКОС — 11Ф617), в состав которой входили три аппаратных комплекса: «Цунами-АМ» на искусственных спутниках Земли, «Цунами-БМ» (P-790) на кораблях и «Цунами-ВМ» на береговых объектах.
Первые спутники системы, Космос-192 и Космос-220, были запущены 23 ноября 1967 года и 7 мая 1968 года соответственно. Председателем государственной комиссии по запуску был назначен начальник НИИ-9 ВМФ контр-адмирал Максюта Ю.И.
Развёртывание системы начато в 1971 году, когда она была сдана в опытную эксплуатацию под названием «Залив». В 1976 году система была принята на вооружение, в составе шести космических аппаратов «Парус», обращающихся на околополярных орбитах высотой 1000 км.
Проект «Циклон» являлся первым в мире совмещённым навигационно-связным спутниковым комплексом. Система обеспечивала определение плановых координат местоположения и была оснащена бортовым ретранслятором для радиотелеграфной связи кораблей ВМФ и подводных лодок с береговыми пунктами управления и между собой. Связь между абонентами осуществлялась как в зонах прямой радиовидимости, так и глобально, с задержкой по времени переноса спутником информации. Также дополнительно излучался радиосигнал на частоте 10 ГГц, который использовался для коррекции корабельной системы указания курса.
Для нормального функционирования системы требуется поддержание на орбите группировки из 6 спутников «Парус». Аппаратура, используемая на этой серии спутников, позволяет определять координаты на плоскости с точностью до 80—100 метров.
Точность определения координат системой «Циклон» уступает характеристикам более современных систем навигации GPS и ГЛОНАСС. В процессе эксплуатации системы выяснилось, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами НКУ — наземного комплекса управления.В 1976 году был разработан гражданский вариант навигационной системы для нужд торгового морского флота, получивший название «Цикада».
Цикада (индекс ГУКОС — 11Ф643) — гражданский вариант морской спутниковой навигационной системы «Циклон». Приёмная аппаратура «Шхуна» обеспечивает определение положения судна с точностью 50-100 метров. Сдана в эксплуатацию в 1979 году в составе 4 спутников, выведенных на круговые орбиты высотой 1000 км, наклонением 83°. Плоскости орбит наклонены на 45° друг к другу. Аналогом системы «Цикада» является КНС «Транзит» (США), снятая с эксплуатации в 1997 году.
Цикада-М — космическая навигационная система, по предназначению, принципу местоопределения и характеристикам аналогичная системе Цикада. Состав системы — 6 космических аппаратов. Система Цикада-М обеспечивает определение координат места со среднеквадратической погрешностью 80 м. В зависимости от географического положения судна дискретность обсервации составляет 10…55 минут.
Создавалась КНС Цикада-М для навигационного обеспечения военных потребителей и эксплуатируется с 1976 года. После 2008 года потребители КНС «Цикада», «Цикада-М» переводятся на обслуживание КНС ГЛОНАСС, и эксплуатация этой системы была прекращена.
Для работы с низкоорбитальными КНС «Цикада», «Цикада-М» разработана и выпускалась корабельная приемоиндикаторная аппаратура «Шхуна», АДК-3,4, «Челн-1» (СЧ-1), «Челн-2» (СЧ-2) и навигационно-геодезическая система «Челн-3» (СЧ-3). Дальнейшее использование этой аппаратуры гражданскими потребителями при введении в эксплуатацию системы ГЛОНАСС не планируется.

Маршрут построен
Если вы думаете, что навигатор в вашем смартфоне получает ваши координаты со спутника, то вы ошибаетесь, и сейчас я объясню, в чём дело.
С середины 20 века гуманисты и филантропы по обе стороны океана озаботились одной интересной оптимизационной задачей – максимизировать количество ущерба, наносимого противнику, затратив минимум супердорогих атомных боеприпасов. Проблема вот в чём – представьте вам надо бросить баскетбольный мячик в кольцо, которое находится в соседнем городе и попасть. Точно всё рассчитать, конечно, можно, но удачным выстрелом считалось попадание с вероятностью 50% в круг диаметром несколько километров. Но это если заранее с высокой точностью известно место старта и место «финиша». Поэтому ядерные подарки старались сделать помощнее, чтобы доставить как можно больше радости людям даже на расстоянии в несколько километров.
Но проблема была ещё и в том, что если место старта заранее известно вам, оно так же известно и противнику, а ракеты того времени не отличались особо в части оперативности подготовки к старту. На то, чтобы собрать и запустить Р-7 с Байконура, требовалось несколько дней. Разумеется, за это время, его могли разбомбить к чертям, поэтому умным головам пришла в голову мысль – прятать оружие под воду и запускать внезапно из случайных мест с подлодок. Но тут опять возникала первая проблема – чтобы прицелиться, нужно знать, где находишься, а компас, хронометр и секстант в данном случае помогут слабо.
Нельзя сказать, что прогресс стоял на месте. Моряки и лётчики использовали гирокомпасы и радиопеленгаторы (радиокомпасы). Первый использует свойство вращающихся тел сохранять свою ориентацию в пространстве (закон сохранения импульса), соответственно, если раскрутить ротор гироскопа и запомнить его ориентацию, при последующих манёврах по его отклонению можно будет судить о курсе.
С изобретением радиосвязи стало возможным использование радионавигации. Сюда входит, как использование радиомаяков, радаров, высотомеров и дальномеров, однако все эти инструменты, хоть и значительно упрощают работу штурмана, но полностью его, разумеется, не заменяют.
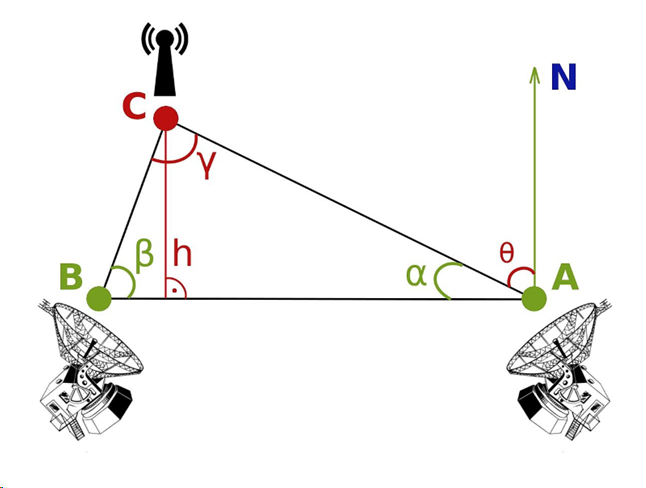
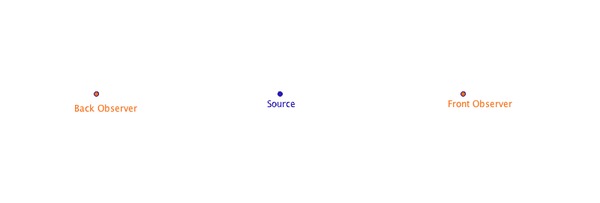
В радионавигации широко используется принцип триангуляции:
На схеме условно показан геометрический принцип определения местоположения относительно трёх точек с заранее известными координатами и расстоянием до них. Пересечения двух кругов дадут 2 возможных координаты, которые будут являться «кандидатами» на ваше расположение. Для уточнения, в какой именно из них вы находитесь, в геометрии потребуется третья точка.
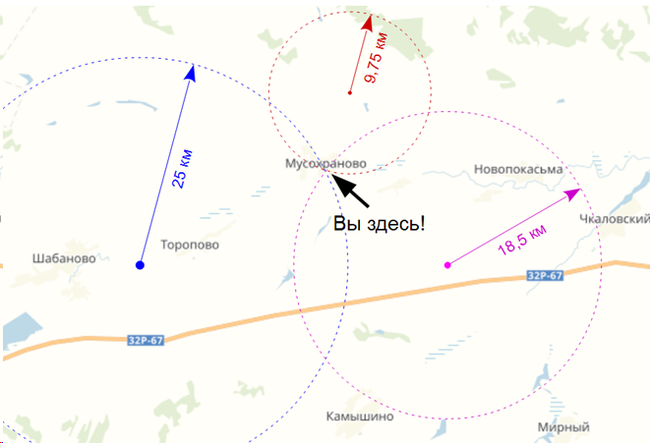
На практике же, достаточно иметь всего два радиомаяка и уметь определить расстояние до них:
Если у вас есть радар, то определить расстояние до нужной вам точки просто – необходимо измерить время, за которое посланный сигнал вернулся обратно и поделить на 2. Но это работает только тогда, когда и приёмник и передатчик сигнала находится у вас. Если же вы имеете только приёмник, то вам необходимо знать, когда именно началась передача. Электроника того времени не справлялась с синхронизацией, поэтому использовалась схема двух сигналов, посылаемых с заранее известной задержкой.
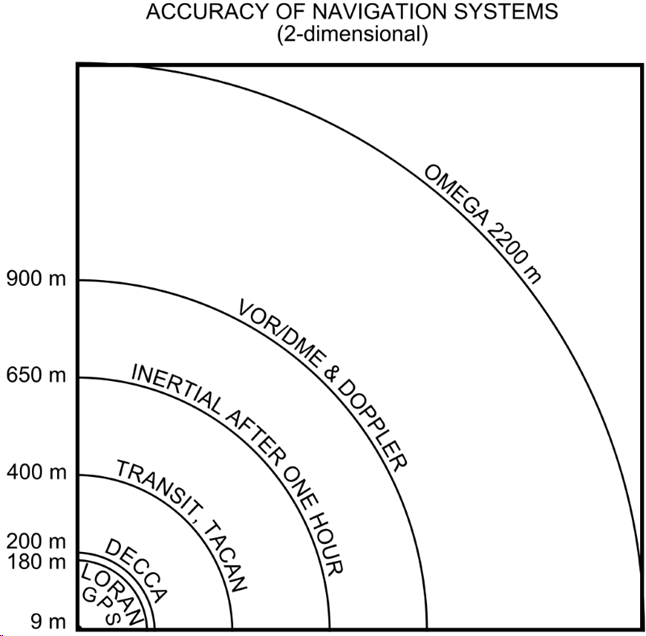
Ниже показаны погрешности в определениях координат известных систем навигации разных времён.
За самым первым искусственным спутником Земли наблюдал весь мир. Наблюдали и американцы, которые и обнаружили, что благодаря эффекту Доплера частота принимаемого со спутника сигнала увеличивается при приближении спутника и уменьшается при его удалении. Если точно знать свои координаты на Земле, по сигналу можно было измерить положение и скорость спутника. Многим людям это было очевидно, однако именно доктору Ричарду Кершнеру из лаборатории прикладной физики университета Джонса Хопкинса первому пришло в голову «перевернуть» уравнение – если точно знать положение спутника, то можно определить собственную скорость и координаты.
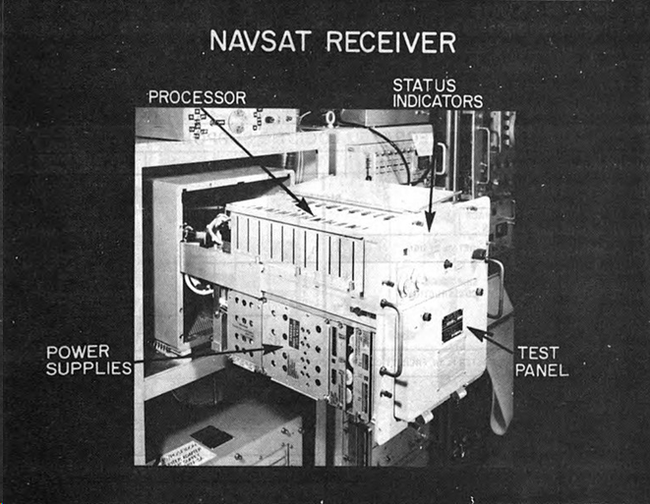
Уже всего 2 года спустя запуска первого искусственного спутника земли, в сентябре 1959 года американцы вывели на орбиту первый спутник системы Transit (NavSat). Первые успешные тесты системы прошли в 1960 г., а в 1964 она была принята в эксплуатацию, разумеется, с вполне «мирными» задачами по расчёту курсов баллистических ракет, запускаемых с подводных лодок. Впрочем, и «на гражданке» появился спрос, а в 1967 году количество гражданских клиентов системы превысило число военных. Система вполне сносно справлялась со своей задачей до 1996 года, обеспечивая точность позиционирования ± 200 м. Плохо было только то, что, что она не покрывала всю территорию Земли (в разное время в ней использовалось 6 – 7 космических аппаратов), и пользоваться ей можно было лишь раз в несколько часов, так как единовременно «над горизонтом» был виден лишь один спутник.
Как я уже сказал, принцип определения местоположения был основан на эффекте Доплера. Спутники вращались по известной траектории, вещали на известной частоте. До приёмника же доходил сигнал несколько другой частоты (в этом и есть суть эффекта). По смещению частот сигналов от нескольких спутников высчитывалось местоположение.
Кто-то может и не знать, как называется этот эффект (некоторые, по их собственным словам, приходят сюда деградировать), но все слышали, как изменяется звук от проезжающего мимо автомобиля. При приближении слышно звук более высокой частоты, когда же машина проедет мимо, звук станет понижаться. На этой гифке показано, что происходит:
Советский сумрачный гений не сильно отставал, и в 1971 году развернул собственную навигационную систему под названием «Циклон» (для гражданских – «Цикада»). Она тоже состояла из 6 спутников, и была почти в 2 раза точнее, позволяя определять своё местоположение с погрешностью 80 – 100 м. Система использовала тот же эффект Доплера и имела те же недостатки, что и у американцев – пользователь должен был самостоятельно определить и указать приёмнику собственную скорость, система выдавала лишь 2 координаты (широту и долготу, высота не определялась), а из-за особенностей орбит спутников, определение координат возможно было лишь в течение 5-6 минут каждый час – полтора (хотя, справедливости ради надо сказать, что в военном варианте было задействовано больше спутников и интервалы были поменьше).
У американцев к началу 70-х годов сложилась интересная ситуация, когда каждое военное ведомство (ВВС, ВМС и армия) запиливали собственные навигационные проекты, бессовестно разбазаривая деньги налогоплательщиков, пока в 1973 году, Конгресс не прекратил это безобразие (хотя и со «скрипом» – скептики говорили, что расшифровка сигналов со спутника не представляла особых сложностей ни для СССР, ни для Китая). Была инициирована программа DNSS, позднее переименованная в NavStar, позднее – в GPS.
В твой смартфон это не влезет!
Советские партия и правительство ответили навигационными спутниками с идеологически-правильным названием серии «Ураган», чем положили начало развёртывания того, что впоследствии назовут ГЛОНАСС (с 1982 по 1998 год вывели аж 74 спутника, 6 из которых потеряли при запуске, а из-за малого срока службы и отсутствия денег, к 2001 году их осталось всего 6).
Но так бы и остался GPS исключительно военной игрушкой, если б не доблестные советские ПВО, сбившие в 1983 возле острова Сахалин Боинг-747 рейса KE007 «Корейских авиалиний». Официально было озвучено, что корейцы просто заблудились, поэтому тогдашний президент США Рональд Рейган пообещал разрешить использовать GPS для гражданских целей по всему миру. Во избежание военного применения системы точность определения координат была специально уменьшена (ходят слухи, что его практически сразу же успешно расшифровали). Загрубление точности отменил только Клинтон в 2000 году.
И так, как же это работает?
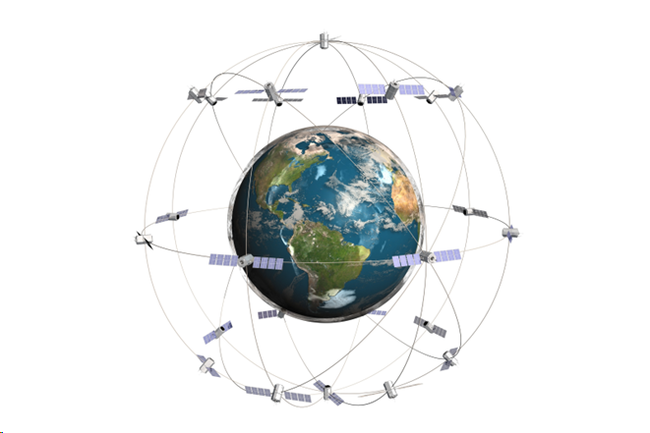
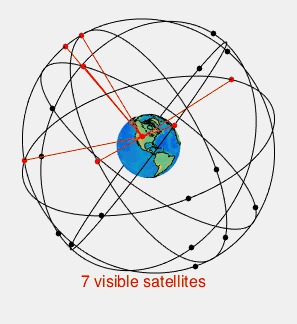
Основной спутниковой навигационной системы являются ВНЕЗАПНО спутники. Орбиты в GPS подобраны так, чтобы орбитальный период составлял половину сидерического дня (11 ч 58 минут). Так, один и тот же спутник проходит над одной и той же точкой земной поверхности примерно дважды в день. С тем расчётом, чтобы из любой точки Земли в пределах прямой «видимости» находилось не менее 6 спутников, всего требуется 24 аппарата, чтобы система стала действительно «глобальной» (то есть доступной по всему миру). Обычно 2-3 аппарата ещё болтаются на орбите «про запас».
Спутники ГЛОНАСС летают чуть ниже (в первую очередь параметры орбит были рассчитаны на покрытие территории РФ). Две системы (GPS и ГЛОНАСС) по принципу своего действия очень похожи, за исключением некоторых технических тонкостей в формировании сигнала, поэтому дальше буду объяснять на примере GPS, потому что по ней тупо больше информации (как ни странно).
Принцип действия системы построен на том, что в любой момент времени мы очень точно знаем, где именно находится спутник. Каждый из спутников имеет на борту высокоточные атомные часы, синхронизированные друг с другом, а также с часами на наземных станциях. Погрешности от эталонного времени (на Земле) корректируются на спутниках ежедневно. В каждом GPS приёмнике тоже есть часы, только менее точные (обычно кварцевые).
Так вот, спутник вас не видит и не слышит, поэтому никаких координат (тем более – ваших) он вам передать не может. Вместо этого каждый спутник постоянно передаёт сигнал, в котором зашифровано его точное время и положение на орбите. В принципе, за исключением некоторой дополнительной несущественной информации, это всё, что на самом деле передают навигационные спутники. Поскольку скорость распространения радиоволн (скорость света) постоянна и не зависит от скорости спутника (привет от Эйнштейна №1), по задержке между началом передачи сигнала со спутника и началом получения этого сигнала на приёмнике, можно определить расстояние от спутника до приёмника. Для однозначного определения положения необходимо решить 4 дифференциальных уравнения, геометрическая интерпретация которых похожа на описанную в начале триангуляцию. Только теперь это называется трилатерация (вообще мультилатерация, но это не существенно).
Если на плоскости нам достаточно двух опорных точек для определения нашего положения (на пересечении пеленгов), то в пространстве мы имеем дело со сферами, поэтому нам необходима третья точка (спутник). Пересечение двух сфер даёт круг (и мы можем находиться в любой точке этого круга. Третья сфера даст нам две возможные координаты, при этом одна из них будет заведомо неверной (например, в космосе, под землёй или слишком далеко, чтобы быть правдой), соответственно, вторая точка и будет нашими координатами:

В силу того, что GPS использует часы очень высокой точности, её сигналы используются не только для навигации, но и в случаях, где нужна точная синхронизация времени, например, в системах, обслуживающих биржевые торги по всему миру.
Точность позиционирования дополнительно повышается усилиями на Земле. По поверхности планеты (как для GPS, так и для ГЛОНАСС) понатыканы наземные станции дифференциальной коррекции. Они проводят замеры на Земле и обновляют информацию на спутниках, подводят часы, ретранслируют часть служебных сообщений и т. д.
Альманах, эфемериды и A-GPS
Навигационные спутники передают ещё два вида данных — альманах и эфемериды. Альманах – это реестр параметров орбит всех спутников. Каждый спутник передаёт альманах для всех спутников в группировке. Данные альманаха не отличаются большой точностью и действительны несколько месяцев.
В свою очередь, данные эфемерид – это набор очень точные корректировки параметров орбит и часов для каждого спутника, что требуется для точного определения координат. Каждый GPS спутник передаёт только данные свою собственную эфемериду. Эти данные действительны только 30 минут. Спутники передают свою эфемериду каждые 30 секунд.
Если GPS был отключён более 30 минут, а потом включён, он начинает искать спутники, основываясь на известном ему альманахе. По нему GPS выбирает спутники для инициации поиска. Если питание приёмника отключить, а потом снова включить в течении 30 минут, он «поймает» спутники очень быстро, т.к. не надо будет снова собирать данные эфемерид. Это называется «горячий» старт.
Если после отключения прошло более 30 минут, будет произведён «тёплый» старт и GPS приёмник снова начнёт собирать данные. Если GPS приёмник был перевезён (в выключенном состоянии) на несколько сотен километров или внутренние часы стали показывать неточное время, то данные имеющегося альманаха являются неверными. В таком случае навигатору требуется выполнить новый «поиск неба» (повторная инициализация) для загрузки нового альманаха и эфемерид. Это уже будет «холодный» старт.
Чтобы избежать подобных проблем используется технология A-GPS (Assisted GPS), ускоряющая «холодный старт» приёмника. Она так же сильно облегчает работу систем навигации в городских условиях, где приём сигнала может быть затруднён из-за застройки или вовсе невозможен внутри зданий. Кроме того, в силу того, что GPS-приёмник потребляет много энергии, использование A-GPS позволяет экономить заряд батареи.
Идея до банальности проста – сначала ваше месторасположение определяется приблизительно, по триангуляции с базовых станций сотовой связи. Затем с ближайшего сервера A-GPS через сети GSM или по Wi-Fi передаётся обновление альманаха, тем самым снижая время ожидания с 30 до 1 секунды.
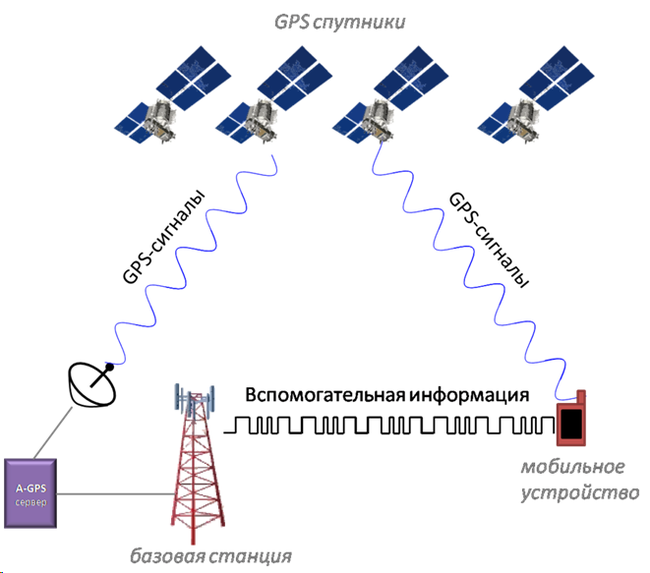
Помните об этом, когда моментально слышите слова «маршрут построен». Без этой технологии, ждать бы вам пришлось ощутимо дольше.
Казалось бы, всё, но нет…
Это не опечатка. Их здесь целых две – специальная и общая (привет от Эйнштейна №2).
Казалось бы, всё у нас хорошо, но внезапно мы понимаем, что находимся глубоко в гравитационном колодце Земли, и согласно общей теории относительности, время для нас течёт медленнее, чем время на спутнике. А согласно специальной теории относительности, время на быстролетящем спутнике с нашей точки зрения должно замедляться. Было бы идеально, если бы эти два эффекта взаимно компенсировали друг друга, однако, это не так.
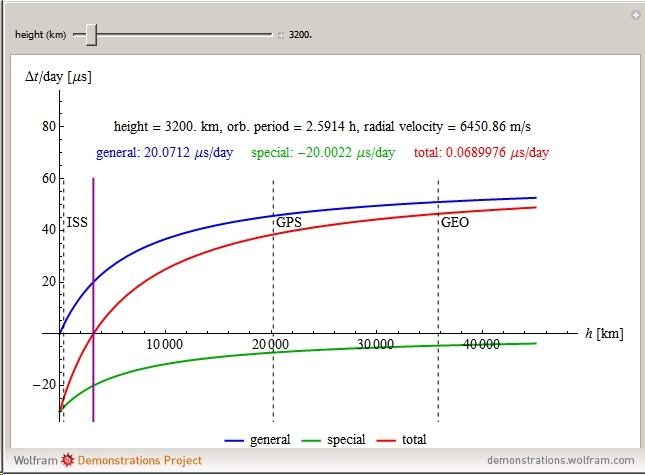
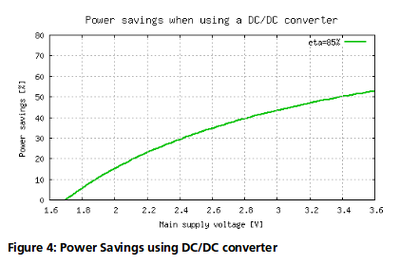
Как видно на графике эффекты специальной и общей теории относительности компенсируются на высоте примерно 3200 км, а выше побеждает гравитация. Для высоты орбиты GPS, каждую земную минуту часы на спутнике должны убегать на 26,7 наносекунд. Это мало, однако ошибка будет накапливаться. За минуту погрешность позиционирования составит примерно 8 метров, через час, ваш навигатор ошибётся уже на 481 метр, а за сутки набежит 11,5 км!
Без поправок на замедление времени на Земле система была бы абсолютно бесполезной, поэтому атомные часы на спутниках специально спроектированы так, чтобы они шли медленнее, чем их земные аналоги, в точности на те 26,7 наносекунд в минуту, чтобы скомпенсировать погрешность.
Когда воинствующие плоскоземельщики, эфиролюбы, торсионщики и креационисты будут нести вам антинаучный бред, просто посоветуйте им выкинуть их смартфоны, как материальное подтверждение лживой теории относительности, недостойное их гения.
Вот теперь, кажется, всё. Спасибо за внимание