/dev/head

Протокол — UART
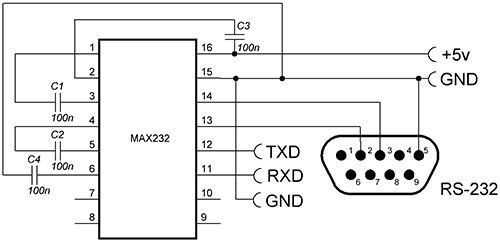
Универсальный асинхронный приёмопередатчик (Universal Asynchronous Receiver-Transmitter (UART)) — узел вычислительных устройств, предназначенный для связи с другими цифровыми устройствами. Преобразует заданный набор данных в последовательный вид так чтобы было возможно передать их по однопроводной цифровой линии другому аналогичному устройству. Метод преобразования хорошо стандартизован и широко применялся в компьютерной технике.Чтобы реализовать RS232 — UART преобразователь, не нужно особо мучатся, можно использовать всего одну микросхему MAX232 и четыре керамических конденсатора. Я чтобы не разводить плату ибо это достаточно трудоёмкий процесс решил «спаять на весу», тем более получается достаточно компактно.
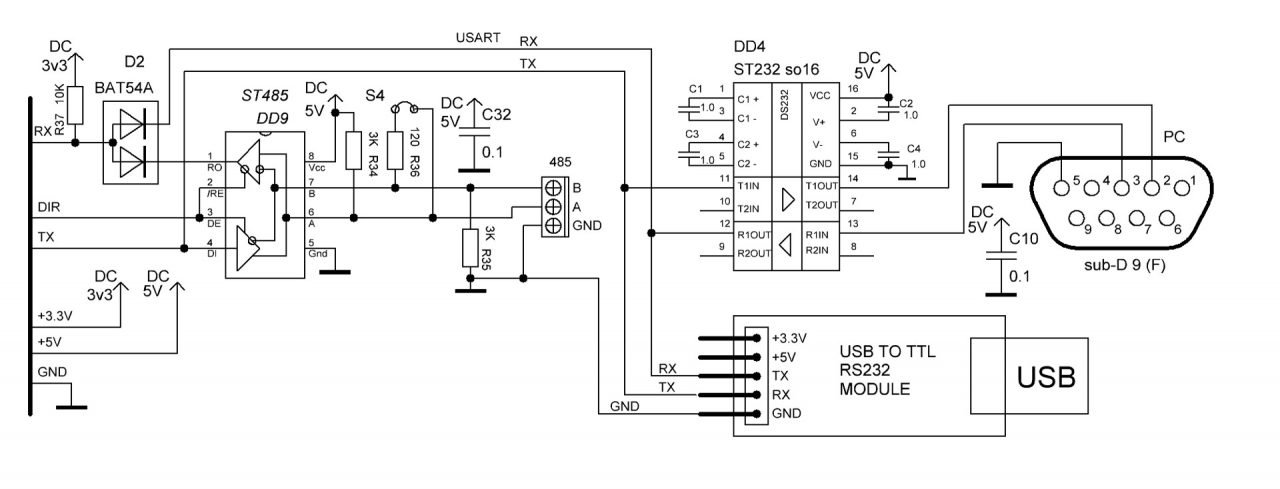
Схема преобразователя:
Я использовал керамические конденсаторы с ёмкостью 1 мкФ. 
После спайки преобразователь выглядит так:

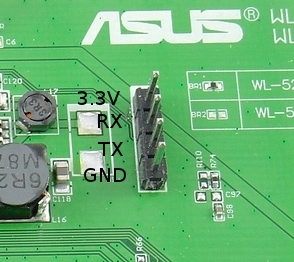
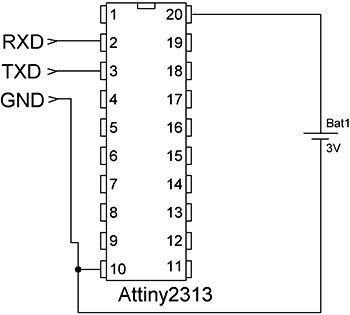
Распиновка UART на примере роутера Asus WL-520GU
Чтобы соединится с устройством, я использую переходник USB/RS232 на безе PL2303 и программу minicom.
Настройка программы minicom:
+————————————————————————+
A — Последовательный порт : /dev/ttyUSB0
B — Размещение lock-файла : /var/lock
C — Программа при выходе :
D — Программа при запуске :
E — Скорость/Чётность/Биты : 115200 8N1
F — Аппаратное управление потоком : Нет
G — Программное управление потоком : Нет
UART – Последовательный интерфейс передачи данных
В сегодняшней статье мы с вами разберемся с последовательным интерфейсом UART, узнаем его плюсы и минусы, а также научимся отлаживать программу с помощью Arduino IDE без применения программаторов. Вас заинтересовало? Тогда читайте дальше!
Серьёзные среды разработки, типа IAR или ATMEL Studio, как правило, содержат в себе либо программный симулятор целевого микроконтроллера, либо имеют программные средства для работы с аппаратными отладчиками.
Среда Arduino IDE не имеет ни того, ни другого, что значительно усложняет поиск ошибок в программе. Компилятор выявляет только синтаксические ошибки, наряду с которыми существуют еще и логические (написано-то правильно, только не то делает), не говоря уж о подсчёте различных коэффициентов… Программы не пишутся без ошибок!
Существует множество методов отладки, но практически для всех необходимо физическое соединение с компьютером. Все платы Arduino (кроме Pro и Pro Mini) имеют «на борту» USB-разъём и специальную микросхему, которая преобразует интерфейс UART в USB. Так не будем же придумывать ничего лишнего и сделаем простейшую отладку с помощью интерфейса, который у нас уже есть!
Среда разработки Arduino IDE уже имеет в своём составе монитор последовательного порта, который позволяет просматривать данные, проходящие через порт, а также отправить свои данные. Таким образом, мы всегда можем передать данные из нашего устройства прямо в компьютер и вывести на экран.
Монитор порта – не единственное средство для работы с ним, в сети можно найти множество программ-мониторов, которые позволяют не только принимать данные, но и стоить графики на их основе, записывать данные в таблицу и многое другое! Это значительно упростит отладку программы.
Так как интерфейс UART выведен не только к преобразователю интерфейсов, его можно использовать и для связи между платами Arduino или, например, платой и датчиком, но это уже тема для другой статьи.
UART интерфейс — описание
UART в переводе с английского звучит как “Универсальный Асинхронный Приёмопередатчик”. Существует ещё его синхронная версия с дополнительной линией тактового сигнала, но она не интересна нам в рамках статьи.

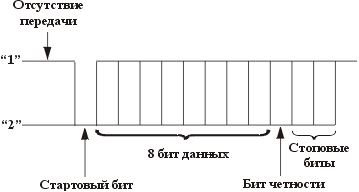
Каждый бит каждого байта передаётся в равный отведённый промежуток времени (фактически, тайм-слот). Стандартным размером данных в посылке является 8 байт, но помимо данных каждый пакет несёт и служебную информацию, а именно:
- стартовый бит (Обязателен)
- стоповый бит (Также обязателен, возможно использование 1, 1.5, 2 стоповых битов)
- бит чётности (Необязателен. Бывает типов Odd, Even)
Кратко параметры передаваемого сигнала записываются так:
[кол-во бит данных] [тип чётности] [кол-во стоп-битов], то есть запись 8N1 характеризует сигнал с 8 битами данных, без бита чётности (N – Not) с 1 стоп-битом.
Так как интерфейс асинхронный, то большую значимость имеет скорость передачи данных – и у приёмника, и у передатчика она должна быть одинаковой.
Скорость измеряется в битах в секунду, или коротко – в бодах. Стандарт RS232 подразумевает скорости от 1200 до 115200 бод, хотя по факту существуют скорости и ниже, и выше, причём до десятков мегабод!
Разумеется, точность везде относительна и скорость никогда не будет равняться 9600 бодам с точностью до единиц. Стандарт предусматривает возможную ошибку в скорости до 5% (не более 3% для уверенного приёма).
Далее сведены основные сведения о сигнале:
- в неактивном (IDLE) режиме обе линии данных подтянуты вверх
- передачу начинает стартовый бит (логический ноль)
- передачу заканчивает стоп-бит (логическая единица)
- данные передаются в режиме LSB (младшим битом вперед)
- для передачи байта требуется минимум 10 бит
4800, 9600, 19200, 38400, 57600, 115200 бод.
| Скорость передачи (бод) | Время передачи одного бита (мкс) | Время передачи байта (мкс) |
|---|---|---|
| 4800 | 208 | 2083 |
| 9600 | 104 | 1042 |
| 19200 | 52 | 521 |
| 38400 | 26 | 260 |
| 57600 | 17 | 174 |
| 115200 | 8,7 | 87 |
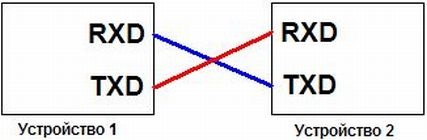
UART может быть запущен как в полудуплексном (только приём или только передача) режиме, так и в полнодуплексном режиме, так как линии приёма и передачи разделены. Линия TXD отвечает за передачу, RXD – за приём, соответственно, линии от приёмника к передатчику перекрещиваются (TX-RX, RX-TX).
Реализация UART в Arduino
Все платы Arduino, построенные на основе оригинальных, имеют минимум один интерфейс UART, продвинутые же платы, типа Arduino Mega 2560 Или Arduino Due, имею сразу 4 аппаратных интерфейса! Они не загружают контроллер, так как они отделены от ядра; всё, что необходимо – это сконфигурировать порт и запихать данные в буфер, после чего операции передачи пойдут независимо от вас.
Конечно, существуют и программные реализации UART, но они нагружают процессор. В любом случае, лучше использовать сначала аппаратные интерфейсы, а потом уже начинать придумывать что-то программное.
Контроллеры Arduino используют логические уровни такие же, каким является питание, то есть для самой популярной платы Arduino UNO уровни будут равны – ноль = 0В, 1 = 5В.
Выводы подключены к преобразователю интерфейсов через резисторы с сопротивлением 1 КОм, а к гребёнкам по бокам платы – напрямую, поэтому сигналы с гребёнок будут иметь больший приоритет. Периодически это мешает прошивать платы с подключенным датчиком по UART, так как для прошивки тоже используется UART.
Микросхема преобразователя интерфейсов не делает из себя ещё один COM-интерфейс для компьютера, она лишь эмулирует его. Несмотря на это, все программы, которые работают с COM-портом посредством Windows API (Win32 API), не отличат порт от физического порта компьютера.
Класс Serial – RS232 в лучших традициях Arduino

Для удобной работы с последовательным портом разработчики Arduino написали целую библиотеку, которая значительно упрощает работу с портом, абстрагируя конечного пользователя от простой, «железной» работы с регистрами. Класс имеет множество функций, которые будут рассмотрены нами далее. Но сначала надо понять, как же компьютер примет и обработает, а точнее покажет то, что мы ему передали.
Всё дело в том, что каждый символ раскладки клавиатуры – это тоже байт. И если просто взять и отправить в порт число 65, он не выведет две цифры 6 и 5, а выведет заглавную латинскую букву А. Почему так? Потому что в таблице кодировки буква А имеет код 65. Класс позволяет выбрать между текстовым и бинарным методом передачи данных, то есть мы сможем отправить число 65 и как букву, и как число.
alex-day › Блог › Интерфейсы микроконтроллеров (Часть 1)
Итак что же такое интерфейс?
Вездесущая Википедия дает такой ответ: Физический (аппаратный) интерфейс — способ взаимодействия физических устройств. Чаще всего речь идёт о компьютерных портах.
Т.е. если мы попытаемся связать наш микроконтроллер с другими устройствами нам потребуется знать определенный набор правил, методов и характеристик оборудования, чтобы сделать это безболезненно. Давайте рассмотрим основные типы интерфейсов, которые мы можем встретить «на борту» микроконтроллера.
Последовательный интерфейс UART/USART
Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter — UART или USART) — удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером.
Изначально использовался в компьютерах для большинства периферийных устройств, таких как плоттер, удаленный принтер, мышь, внешний модем и т. д. До настоящего времени для последовательной связи IBM PC-совместимых компьютеров используются адаптеры с интерфейсом RS-232С (новое название EIA-232D). В современном IBM PC-совместимом компьютере может использоваться до четырех последовательных портов, имеющих логические имена соответственно COM1, COM2, COM3 и COM4. Основой последовательного адаптера является микросхема UART (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемопередатчик. Обычно используется микросхема UART 16550A. Она имеет 16-символьный буфер на прием и на передачу и, кроме того, может использовать несколько каналов прямого доступа в память DMA -habrahabr.ru/post/37455/ . При передаче микросхема UART преобразует параллельный код в последовательный и передает его побитно в линию, обрамляя исходную последовательность битами старта, останова и контроля. При приеме данных UART преобразует последовательный код в параллельный (разумеется, опуская служебные символы). Непременным условием правильной передачи (приема) является одинаковая скорость работы приемного и передающего UART, что обеспечивается стабильной частотой кварцевого резонатора. Основным преимуществом последовательной передачи является возможность пересылки данных на большие расстояния, как правило, не менее 30 метров. В IBM PC-совместимых персональных компьютерах из 25 сигналов, предусмотренных стандартом RS-232, используются в соответствии с EIA только 9; таким образом, в данном интерфейсе как правило применяются 9-контактные разъемы типа DB-Shell.
В современных компьютерах UART и СОМ порт уже не применяются напрямую, но они получили вторую жизнь для связи с различными нестандартными внешними устройствами в числе которых вошли и устройства на микроконтроллерах. Аппаратная часть при этом стала значительно проще для связи микроконтроллеров друг с другом подключение UART осуществляется по трём линиям: RXD – приём, TXD – передача и GND – общий (минус).
Подключать UART надо, так сказать «наоборот» RXD к TXD, а TXD к RXD как на картинке ниже:
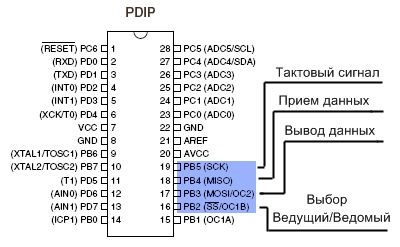
Последовательный периферийный интерфейс SPI
Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR.
Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.
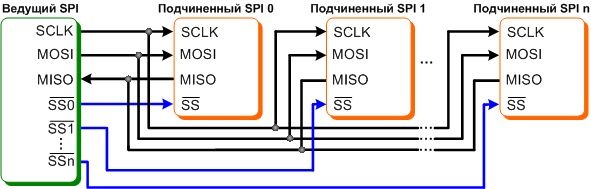
Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от ‘Serial Peripheral Bus’, что отражает его предназначение — шина для подключения внешних устройств. Шина SPI организована по принципу ‘ведущий-подчиненный’. В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др.
Главным составным блоком интерфейса SPI является обычный сдвиговый регистр, сигналы синхронизации и ввода/вывода битового потока которого и образуют интерфейсные сигналы. Таким образом, протокол SPI правильнее назвать не протоколом передачи данных, а протоколом обмена данными между двумя сдвиговыми регистрами, каждый из которых одновременно выполняет и функцию приемника, и функцию передатчика. Непременным условием передачи данных по шине SPI является генерация сигнала синхронизации шины. Этот сигнал имеет право генерировать только ведущий шины и от этого сигнала полностью зависит работа подчиненного шины.
Электрическое подключение
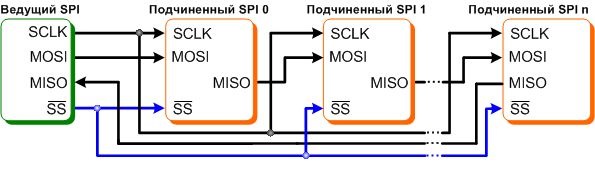
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала.

CPOL — исходный уровень сигнала синхронизации (если CPOL=0, то линия синхронизации до начала цикла передачи и после его окончания имеет низкий уровень (т.е. первый фронт нарастающий, а последний — падающий), иначе, если CPOL=1, — высокий (т.е. первый фронт падающий, а последний — нарастающий));
CPHA — фаза синхронизации; от этого параметра зависит, в какой последовательности выполняется установка и выборка данных (если CPHA=0, то по переднему фронту в цикле синхронизации будет выполняться выборка данных, а затем, по заднему фронту, — установка данных; если же CPHA=1, то установка данных будет выполняться по переднему фронту в цикле синхронизации, а выборка — по заднему). Информация по режимам SPI обобщена в таблице.